





















生産工場には無数のケーブルが縦横無尽に張り巡らされています。これらのケーブルは、1本でも破損すれば、ラインは止まり、生産計画に影響を及ぼします。そのため、特に、回転テーブルや回転機構、コネクタの脱着を繰り返すセル生産やロボットツールなどは、定期なメンテナンスやコンポーネンツの交換を行う予防保全を余儀なくされています。
バルーフのインダクティブカプラは、わずか数ミリではありますが、空間を介して制御信号と電力の送信を行える接続機器です。このデバイスは、機器の動作により負荷がかかる個所や頻繁な脱着でコネクタが劣化する設備の改善に大きく貢献します。
インダクティブカプラとは?
インダクティブカプラは制御側の「ベース」とデバイス側の「リモート」という2種類のデバイスで構成されています。このデバイスは電磁誘導の動作原理を活用しており、この技術はワイヤレス充電や電子マネー、RFIDなどで、その実用性と信頼性は証明されています。バルーフのインダクティブカプラは最大1.7Aの出力に対応しますが、ベースとリモートの距離が離れると、供給できる電力は減少します。

メンテナンスフリーの回転テーブルの配線
回転テーブルの上には、ワークの着座の保持やその確認ために、センサが搭載されています。これらの信号の伝送や電力の供給を行うため、従来はスリップリングが使用され

ています。しかし、スリップリングはその機構上、劣化が発生し、定期的なメンテナンスや交換が必要なります。
これをインダクティブカプラに置き換えれば、メカ的な接触がないため、摩耗なく信号の伝送と電力の供給を行うことができます。リモートとベースを回転させた後に向い合せになるよう設置すればよいだけなので、導入がシンプルになります。永久的にメンテナンスが不要に装置の稼働率を向上させます。
作業ステーションの着座確認
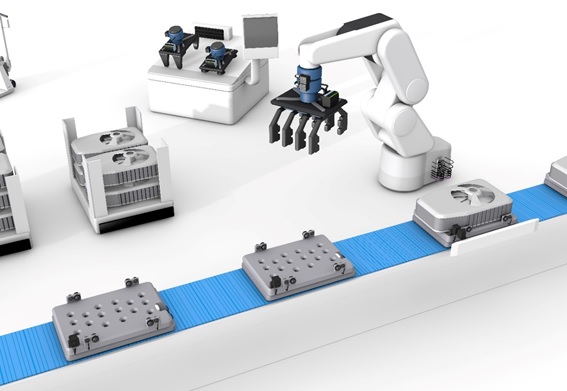
セル生産において作業ステーション上にワークが搬送された際、その着座確認信号の取得に、インダクティブカプラは最適のシステムです。台座やパレットを所定の位置に置くだけで、瞬時に着座確認信号を取得できるシステムを構築できます。接続によるコネクタの劣化をなくし、タクトの向上も図れます。また、昨今では人の代わりに協調ロボットの活用も要望も増えています。その際、このシステムは完全自動化のセル生産システムに貢献します。
非接触のロボットツール交換
多品種生産を行うため、1つの生産ラインで様々な製品を製造できる柔軟性を求められています。ロボットも多様な製品やワークを搬送するため、様々なツールを交換しながら運用することが求められてきました。多くのロボットのツールチェンジャではボールカップリングの方式が取られています。しかし、あるお客様では度重なる交換による摩耗劣化で突発的なダウンタイムが発生し、生産計画に支障をきたすため、定期的な交換を余儀なくされていました。
これを、IO-Link対応のインダクティブカプラとI/Oハブのシステムに交換することで、摩耗劣化によるトラブルをなくし、交換作業の時間と部品のコストを節約することができ、歩留まりを向上させることができました。さらに、I/Oハブに搭載されたID機能で、別途システムを追加することなく、ツールの識別を確実に行うことができました。これにより、誤ったツールの接続による事故や廃棄品をなくすことができます。
インダクティブカプラの製品ラインナップはこちら
